Projects
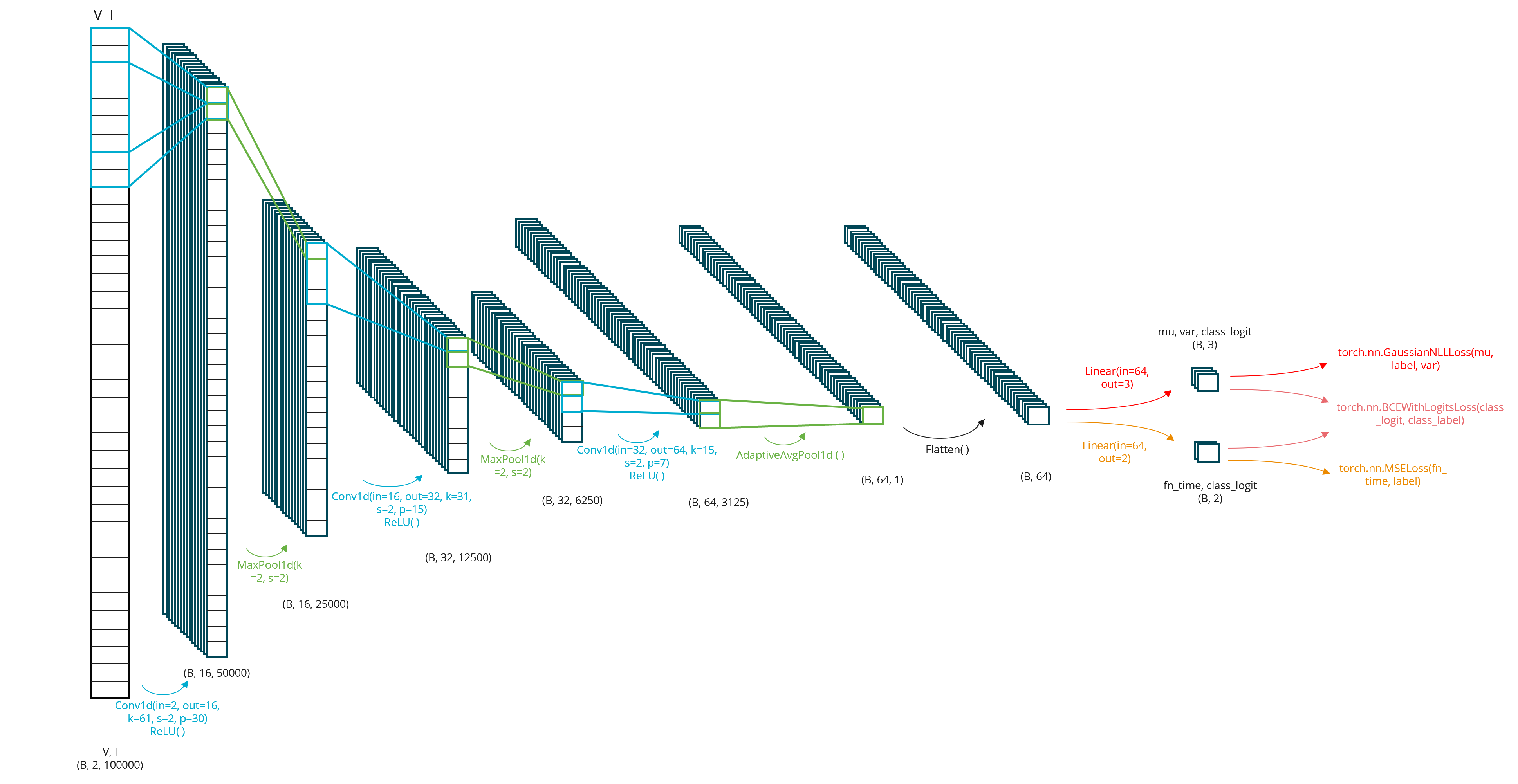
1DCNN for Time-Series Anomaly Detection
Evaluating Foundation Model Robot Pose Estimation with Synthetic Data Generation
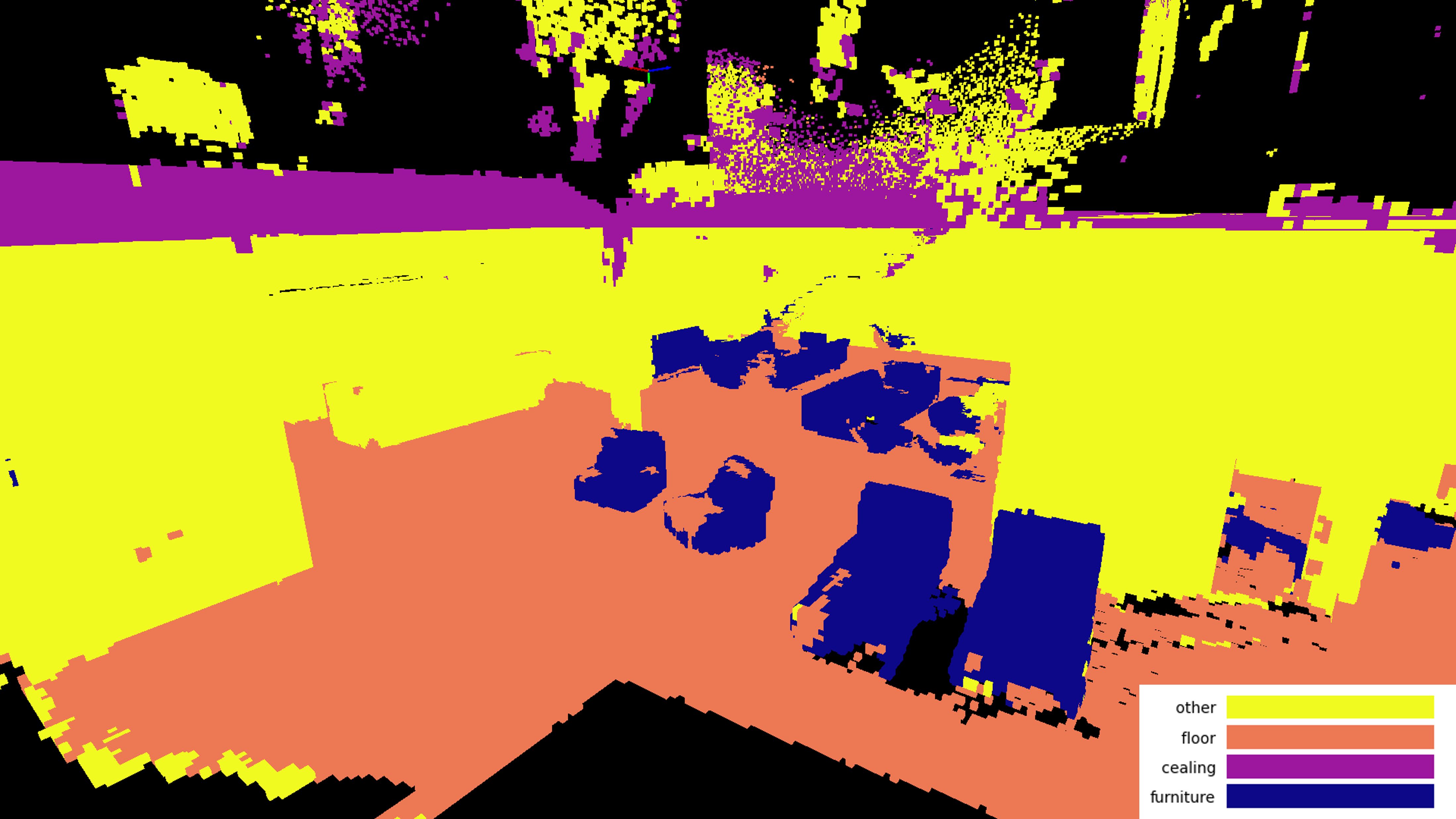
3D Open Vocabulary Semantic Segmentation for Robot Navigation
Regularization, Hyperparameter Tuning on Low Rank Autoregressive Models
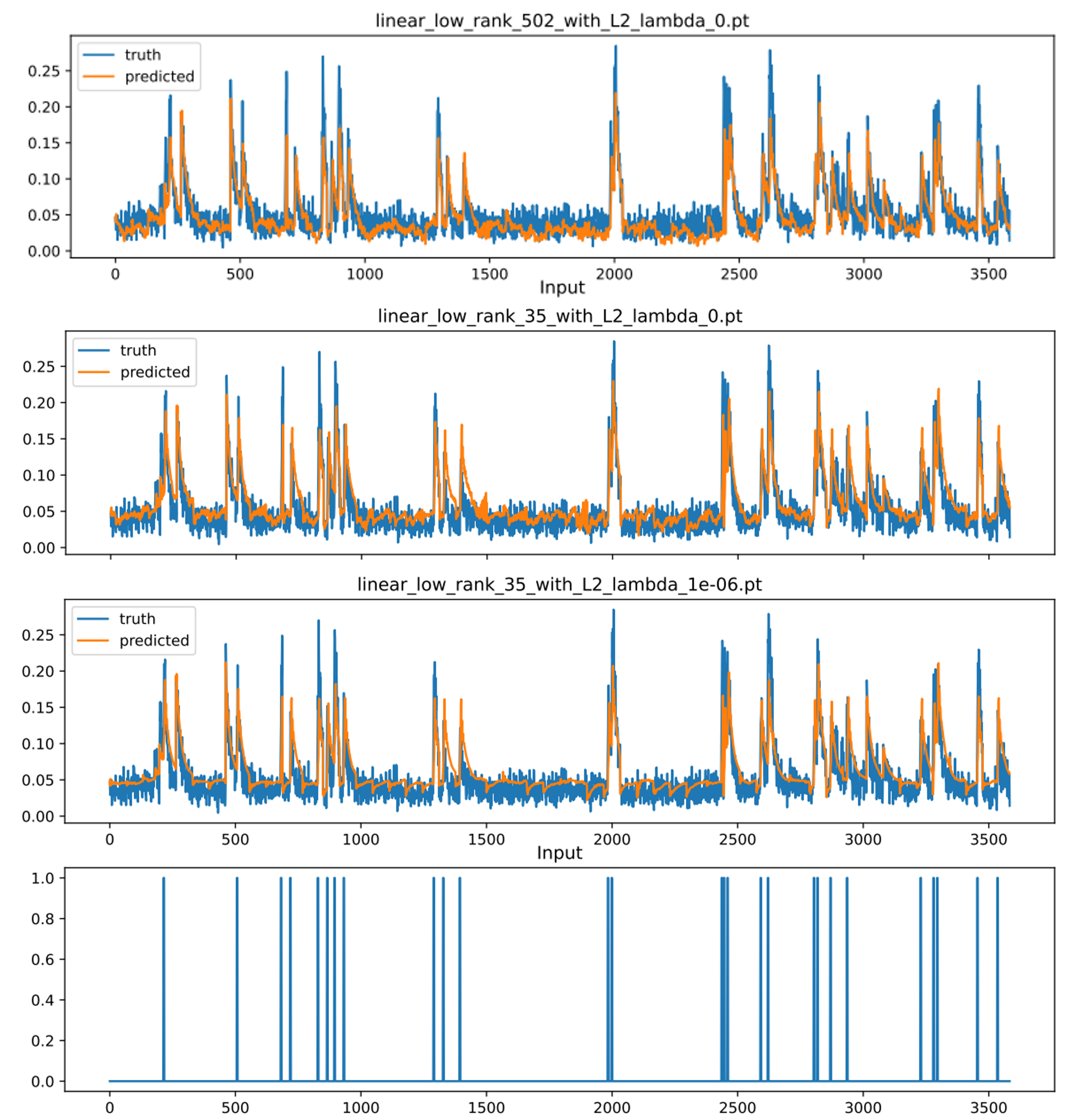
Image-Captioning Tactical Advisor Model (ICTAM)
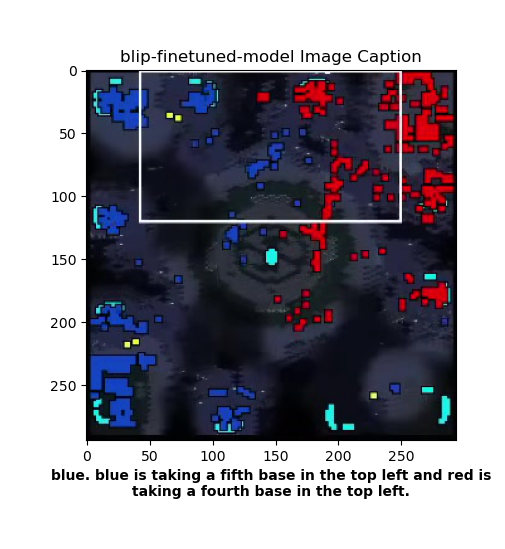
Image Processing for Fisheye Camera Image Object Detection

Evaluating Sensor Fusion SLAM
Youtube: study2simple